I'm trying to render a model of a hand in a 3D space based on the positions given by
the XrHandJointLocationEXT array from the XR_EXT_hand_tracking extension.
I am using both GTLF hand models from Valve, which have the correct amount of bones
to match the joints defined by the OpenXR specification in the XrHandJointEXT enum.
I do my rendering as follows :
Every frame I update each joint independently by multiplying its current transform
with the inverse bind matrice retrieved from the GLTF model. The XrPosef is relative to the center of the 3D space. I am using cglm to handle all the matrice calculations.
for (size_t i = 0; i < XR_HAND_JOINT_COUNT_EXT; ++i) {
const XrHandJointLocationEXT *joint = &locations->jointLocations[i];
const XrPosef *pose = &joint->pose;
glm_mat4_identity(model->bones[i]);
vec3 position;
wxrc_xr_vector3f_to_cglm(&pose->position, position);
glm_translate(model->bones[i], position);
versor orientation;
wxrc_xr_quaternion_to_cglm(&pose->orientation, orientation);
glm_quat_rotate(model->bones[i], orientation, model->bones[i]);
glm_mat4_mul(model->bones[i], model->inv_bind[i], model->bones[i]);
}
Then the bones array is uploaded to the vertex shader, along with the view-proj
matrix, computed for each eye of the HMD.
#version 320 es"
uniform mat4 vp;
uniform mat4 bones[26];
layout (location = 0) in vec3 pos;
layout (location = 1) in vec2 tex_coord;
layout (location = 2) in uvec4 joint;
layout (location = 3) in vec4 weight;
out vec2 vert_tex_coord;
void main() {
mat4 skin =
bones[joint.x] * weight.x +
bones[joint.y] * weight.y +
bones[joint.z] * weight.z +
bones[joint.w] * weight.w;
gl_Position = vp * skin * vec4(pos, 1.0);
vert_tex_coord = tex_coord;
}
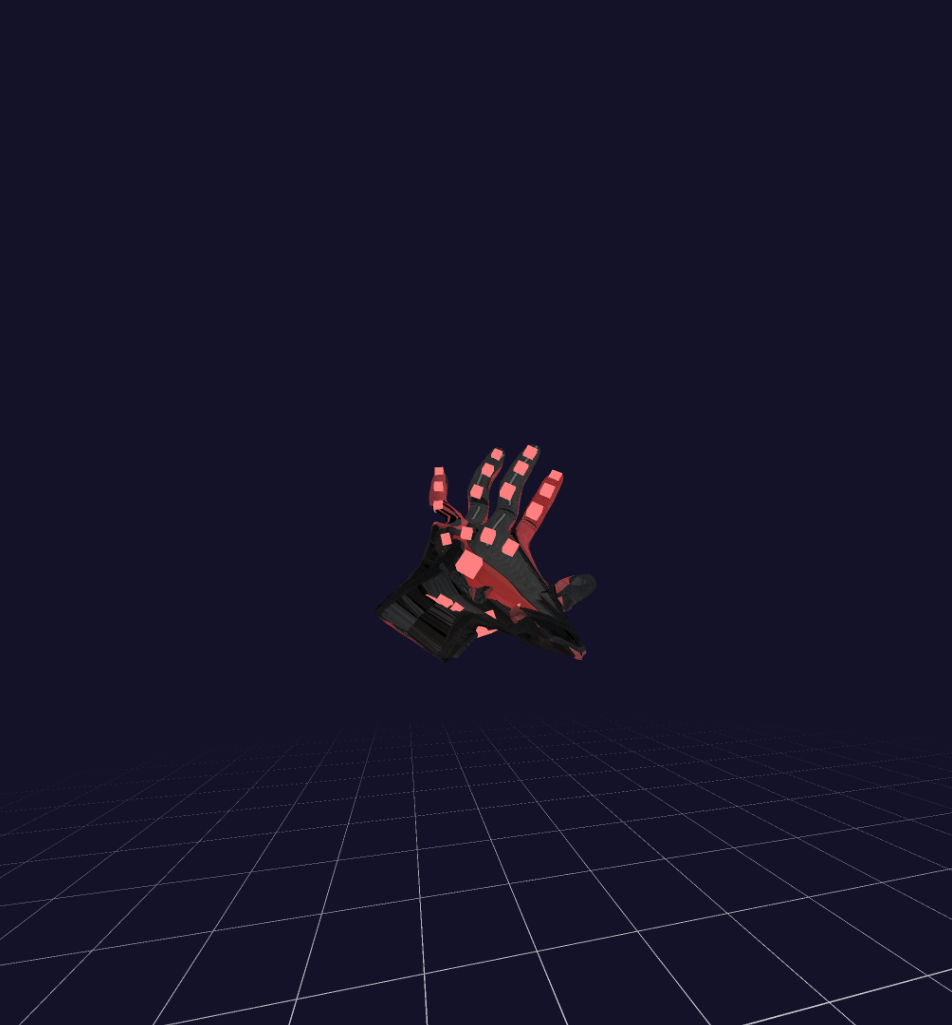
Is the method of calculation correct? I get decent but "glitchy" results. As you can see on the following screenshot, i rendered both independant joints on top of the hand model, and you can see a glitch on the thumb.
Should I take account of the parent bone when computing my bone transform?

Finally found the answer to my problem: the joint order from the GTLF model doesn't match the order XrHandJointEXT, leading to the right transform being applied to the wrong joint.
In my case, my model defined the
Wristnode as being the first one and thePalmas the last one, where OpenXR definesXR_HAND_JOINT_PALM_EXTas the first joint, andXR_HAND_JOINT_WRIST_EXTas the second one.Here's the code for the update function